
티스토리 뷰
이 포스트는 뭔가 좀 잘못됐다. 내가 경식이형의 visualization 코드를 잘 이해를 못했다. 또한 원래 python matplotlib는 right hand rule이다. left hand rule이 아니라.
def vis_3d_pose(kps_3d, kps_line, joint_set_name='', prefix='vis3dpose', gt=False, ax_in=None):
if joint_set_name == 'human36':
r_joints = [1, 2, 3, 14, 15, 16]
elif joint_set_name == 'coco':
r_joints = [2, 4, 6, 8, 10, 12, 14, 16]
elif joint_set_name == 'smpl':
r_joints = [2, 5, 8, 11, 14, 17, 19, 21, 23]
else:
r_joints = []
# r_joints = [2, 4, 6, 10, 12, 14]
kps_3d_vis = np.ones((len(kps_3d), 1))
if not ax_in:
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
else:
ax = ax_in
for l in range(len(kps_line)):
i1 = kps_line[l][0]
i2 = kps_line[l][1]
x = np.array([kps_3d[i1, 0], kps_3d[i2, 0]])
y = np.array([kps_3d[i1, 1], kps_3d[i2, 1]])
z = np.array([kps_3d[i1, 2], kps_3d[i2, 2]])
if kps_3d_vis[i1, 0] > 0 and kps_3d_vis[i2, 0] > 0:
ax.plot(x, z, -y, c='r', linewidth=1) # 여기
if kps_3d_vis[i1, 0] > 0:
c = 'g' if i1 in r_joints else 'b'
ax.scatter(kps_3d[i1, 0], kps_3d[i1, 2], -kps_3d[i1, 1], c=c, marker='o') # 여기
if kps_3d_vis[i2, 0] > 0:
c = 'g' if i2 in r_joints else 'b'
ax.scatter(kps_3d[i2, 0], kps_3d[i2, 2], -kps_3d[i2, 1], c=c, marker='o') # 여기
ax.set_xlabel('X axis')
ax.set_ylabel('Z axis') # 여기
ax.set_zlabel('Y axis') # 여기
title = f'3D Ground Truth' if gt else f' 3D Prediction'
ax.set_title(title)
ax.legend()
axisEqual3D(ax)
if not ax_in:
plt.show()
cv2.waitKey(0)
cv2.destroyAllWindows()
cv2.waitKey(1)
now = datetime.now()
file_name = f'{prefix}_{now.isoformat()[:-7]}_{"3d_gt" if gt else "3d_pred"}.jpg'
# fig.savefig(osp.join(cfg.vis_dir, file_name))
plt.close(fig=fig)
else:
return ax이 코드는 3D joint skeleton을 matplotlib로 그리는 코드인데, for loop부분을 보면 알 수 있듯이 z와 y값을 자리를 바꾸고 y값을 invert한다. 대체 이러는 이유를 잘 이해하지 못했고, 무언가 심오한 게 있는 줄 알았다. 데이터의 카메라좌표계와 matplotlib의 좌표계가 달라서 그걸 맞췄나 보다 등 이 전 포스트에 개소리를 써놨었다...
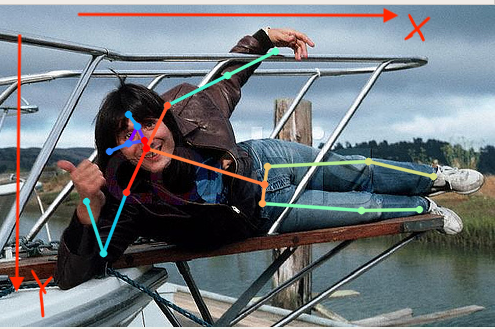
일단, 저런 처리(axis change)를 안하고, x,y,z있는 그대로 visualize해도 이상할 건 없다. 아래는 input 이미지 위에 2d pose overlay한 것, 그리고 axis change없이 그대로 visualize했을 때 figure다.


처음에 왜 y축의 방향이 이상하지? 라고 생각했다. 직관적으로 생각하면 y축이 위로 올라가야 하니까. 아 핀홀카메라 모델이라 그런가? 그럼 왜 x축은 직관적인 방향이지? 등등 계속 헷갈렸는데, 사실 코드의 관점에서 보면 헷갈리지 않다.
def cam2pixel(cam_coord, f, c):
x = cam_coord[:, 0] / (cam_coord[:, 2] + 1e-8) * f[0] + c[0]
y = cam_coord[:, 1] / (cam_coord[:, 2] + 1e-8) * f[1] + c[1]
z = cam_coord[:, 2]
img_coord = np.concatenate((x[:,None], y[:,None], z[:,None]),1)
return img_coord
3d joint skeleton이 cam2pixel을 거쳐 결국 그 위의 2d pose가 되는 것인데, 이미지의 x,y좌표값의 방향을 잘 생각해보자.
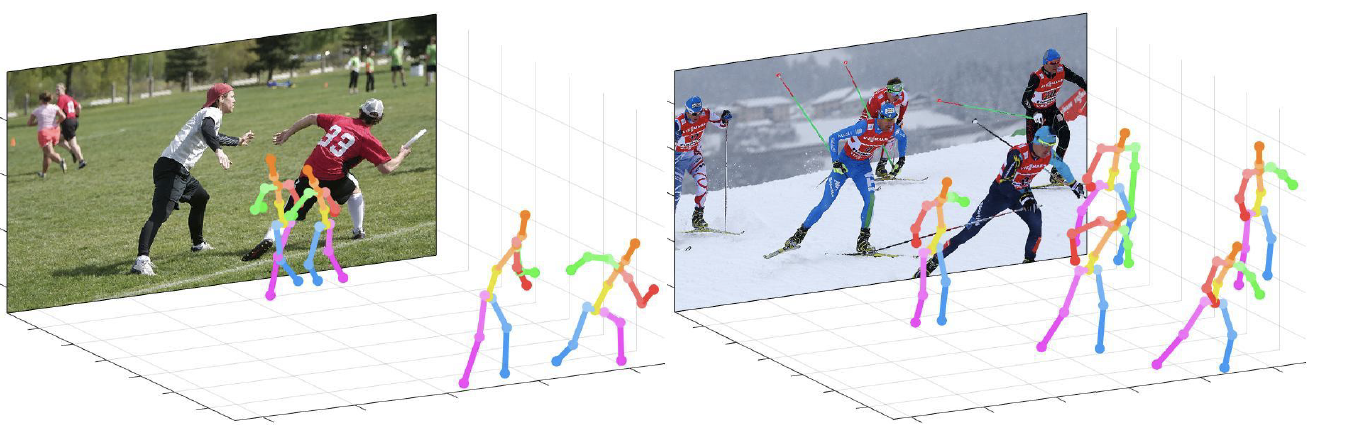
이렇게 보면, gt 3d joint skeleton의 값과, y축의 방향이 이미지의 좌표축과 align되있음을 알 수 있다. 그리고 gt 3d joint skeleton이 cam2pixel을 거치면 자연스럽게 이미지의 2d pose처럼 되리라는 것도 유추할 수 있다.

그렇다면 다시 첫 번 째 코드, vis_3d_pose로 돌아와서. 왜 저렇게 귀찮은 짓(axis change, 여기 라고 주석달린 부분)을 하는 걸까? 그건 우리가 3d joint skeleton을 볼 때 가장 자연스럽게 보여주고자 함이다. 우리는 보통 Y축은 위를 향한다고 생각하니까.

Y축이 위로 향하니 마음이 편안하다. 다음 포스트는 rotation과 visualization에 대해 쓰겠다.
'Research (연구 관련)' 카테고리의 다른 글
| NeuralBody setting (0) | 2021.05.16 |
|---|---|
| UserWarning: Matplotlib is currently using agg, which is a non-GUI backend, so cannot show the figure (0) | 2021.05.05 |
| openpose Pytorch code 활용 (0) | 2021.03.15 |
| SPIN demo code 사용 (0) | 2021.03.11 |
| tool 자투리 (0) | 2021.03.06 |
- Total
- Today
- Yesterday
- 컴퓨터비젼
- Virtual Camera
- spin
- focal length
- world coordinate
- part segmentation
- 2d pose
- 문경식
- 컴퓨터비전
- pytorch
- 비전
- 에디톨로지
- Machine Learning
- 인터뷰
- nerf
- 피트니스
- camera coordinate
- pyrender
- deep learning
- demo
- densepose
- Pose2Mesh
- 머신러닝
- Generative model
- Interview
- Transformation
- 헬스
- VAE
- nohup
- Docker
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |