
티스토리 뷰
Part 8 End-effector Constraints
08/20/2024
"Tactile Sensing and Active Haptic Sensing"
Site of Contact
Within Hand, Among Fingers, Between Hands
- Sensitivity Varies by Hand Region:
- Different parts of the hand have varying sensitivities. For instance, the fingertips are more sensitive to pressure than the palm.
- Example: If you lightly press on your fingertip and then on your palm, you'll notice the sensation is more pronounced on the fingertip.
- Proximodistal Gradient in Spatial Resolution:
- Spatial acuity improves as you move from the base of the fingers to the tips. The fingertips can detect finer details than the palm.
- Example: When reading Braille, people use their fingertips, not their palms, because the fingertips can distinguish the small bumps more accurately.

- Finger-Specific Sensitivity:
- Among the fingers, the index finger generally has the highest spatial acuity, followed by the middle and ring fingers.
- Example: If you try to feel small textures with your index finger and then with your ring finger, you'll likely notice that the index finger is better at detecting the details.
- Differences in Thermal Sensitivity:
- Thermal sensitivity (sensing warmth and cold) is greater on the back of the hand than on the palm or fingerpads.
- Example: When you touch something warm, like a mug of coffee, you'll often feel the temperature change more quickly on the back of your hand than on your palm.
- Hand Laterality and Task Performance:
- There’s generally no strong difference between the left and right hands in terms of basic touch sensitivity, but each hand may excel at different tasks—spatial tasks for the left hand and verbal tasks for the right.
- Example: A right-handed person might use their left hand more effectively for tasks that involve spatial perception, like solving a puzzle, while their right hand might be better for writing or typing
Contact Area and Duration:
- Spatial Summation Increases Vibrotactile Sensitivity:
- Vibrotactile sensitivity increases with larger contact areas, particularly at frequencies above 40 Hz.
- Example: A larger area of skin contact, such as gripping a vibrating handle, enhances the sensation of vibration more than using a small probe.
- Temporal Summation Affects Sensitivity:
- Sensitivity to vibrations and thermal changes grows with increased duration of contact, especially at higher frequencies and larger contact areas.
- Example: Holding your hand against a vibrating surface for longer durations makes the vibration more perceptible.
- Thermal Sensitivity Enhanced by Area and Duration:
- Thermal sensitivity is enhanced when the area of skin contact increases or when exposure to temperature changes is prolonged.
- Example: A larger area of your hand feels the warmth of a heating pad more strongly than a smaller area.
Number of Digits Stimulated:
- Perceptual Enhancement Through Multiple Digits:
- Using more than one finger can enhance the perception of roughness or heaviness, likely due to spatial summation.
- Example: The roughness of a surface feels more pronounced when both the thumb and index finger are used together compared to just using the index finger alone.
- Limited Improvement in Tactile Pattern Recognition:
- Increasing the number of digits involved in passive tactile tasks, like reading Braille, does not significantly improve the perception of spatial patterns.
- Example: Using two fingers instead of one does not make it easier to identify Braille characters.
Unimanual Versus Bimanual:
- Two-Hand Advantage in Larger or Complex Objects:
- Using two hands is beneficial for exploring larger objects, assessing symmetry, or recognizing patterns, especially when parallel movements are involved.
- Example: Identifying the symmetry of an object is easier when using both hands compared to just one.
- Stabilization and Exploration Roles:
- When an object is not fixed, one hand often stabilizes it while the other hand explores, each hand providing different sensory information.
- Example: Holding a jar with one hand while unscrewing the lid with the other allows for better control and sensory feedback.
Direct Versus Remote Sensing:
- Direct Contact Maximizes Sensory Input:
- Direct tactile contact provides full access to mechanical, thermal, and kinesthetic information, which enhances object recognition and sensory processing.
- Example: Feeling the texture of a fabric directly with your hand gives a clearer sense of its material compared to using a tool.
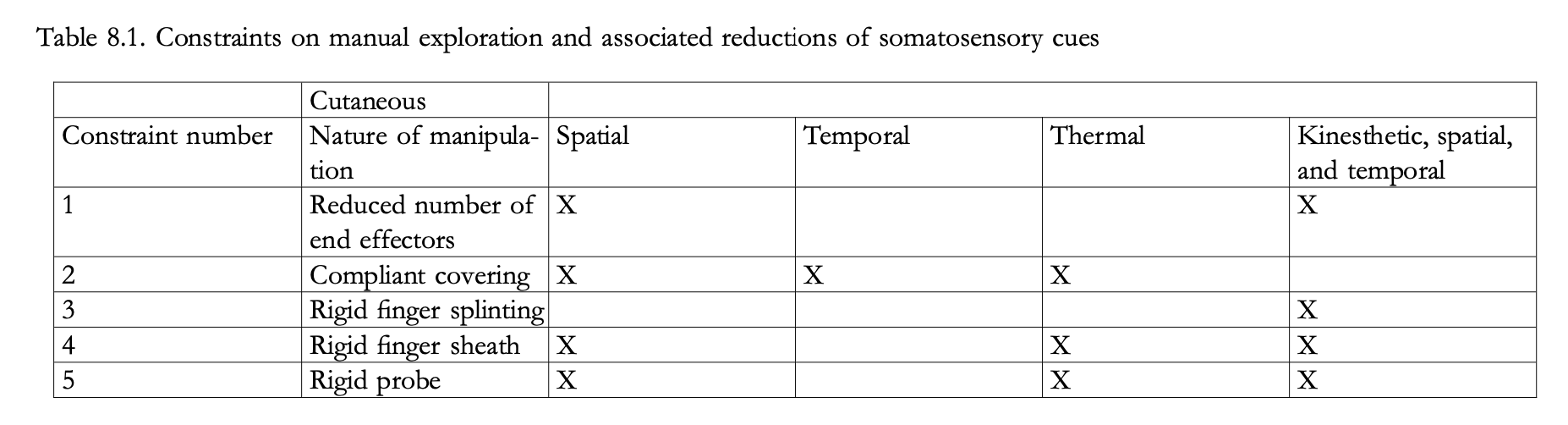
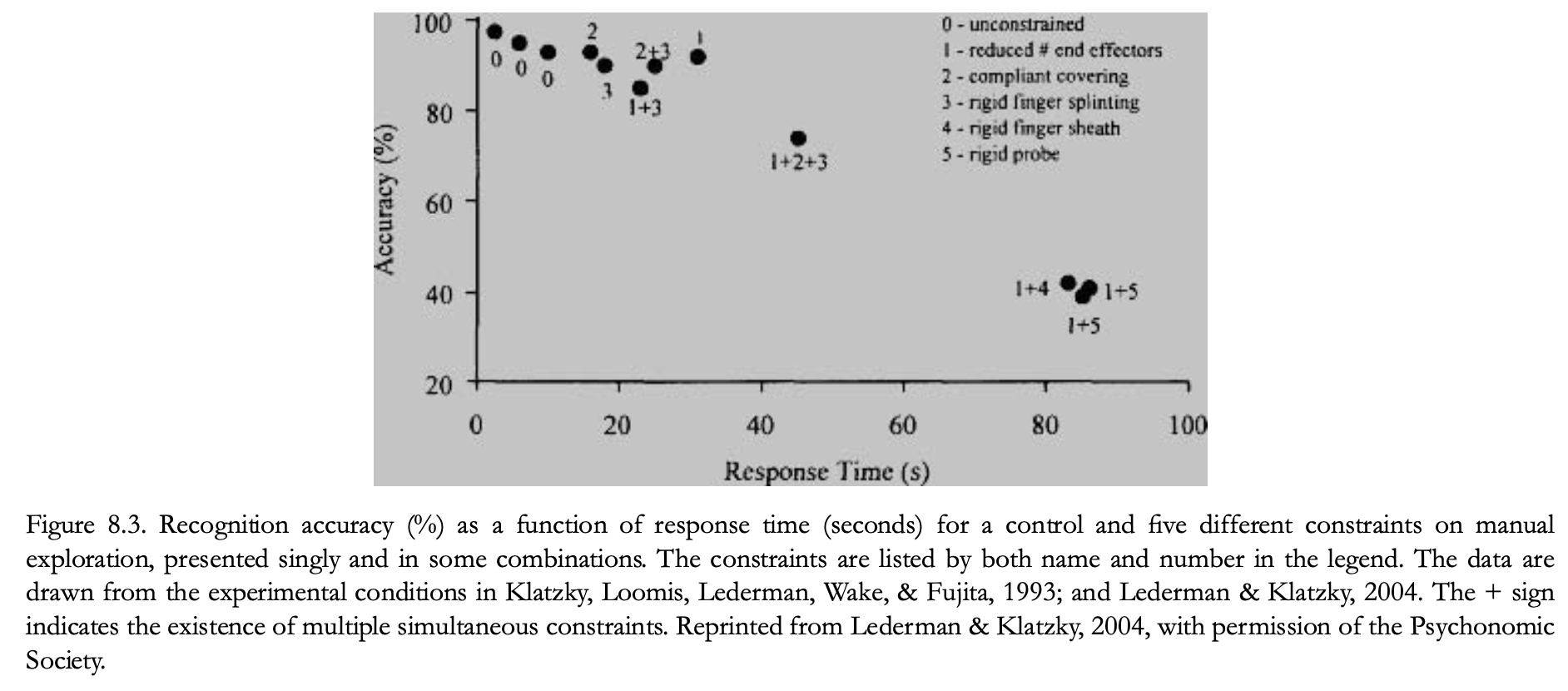
- Constraints in Remote Sensing Impair Perception:
- Using tools or constraints like gloves reduces the availability of tactile and kinesthetic feedback, impairing accuracy and speed in object recognition.
- Example: Wearing a thick glove while handling an object makes it harder to discern its texture and shape accurately.
"Prehension"
Site of Contact
- Prehensile Grips:
- Power Grip: This grip involves a large contact area between the hand and the object and is used for tasks requiring force. For example, using a hammer involves a power grip where the whole hand moves the hammer.
- Precision Grip: This grip involves using the tips of the thumb and one or more fingers for precise control. For instance, picking up a small coin uses a precision grip, such as the tip pinch, to ensure accurate placement.
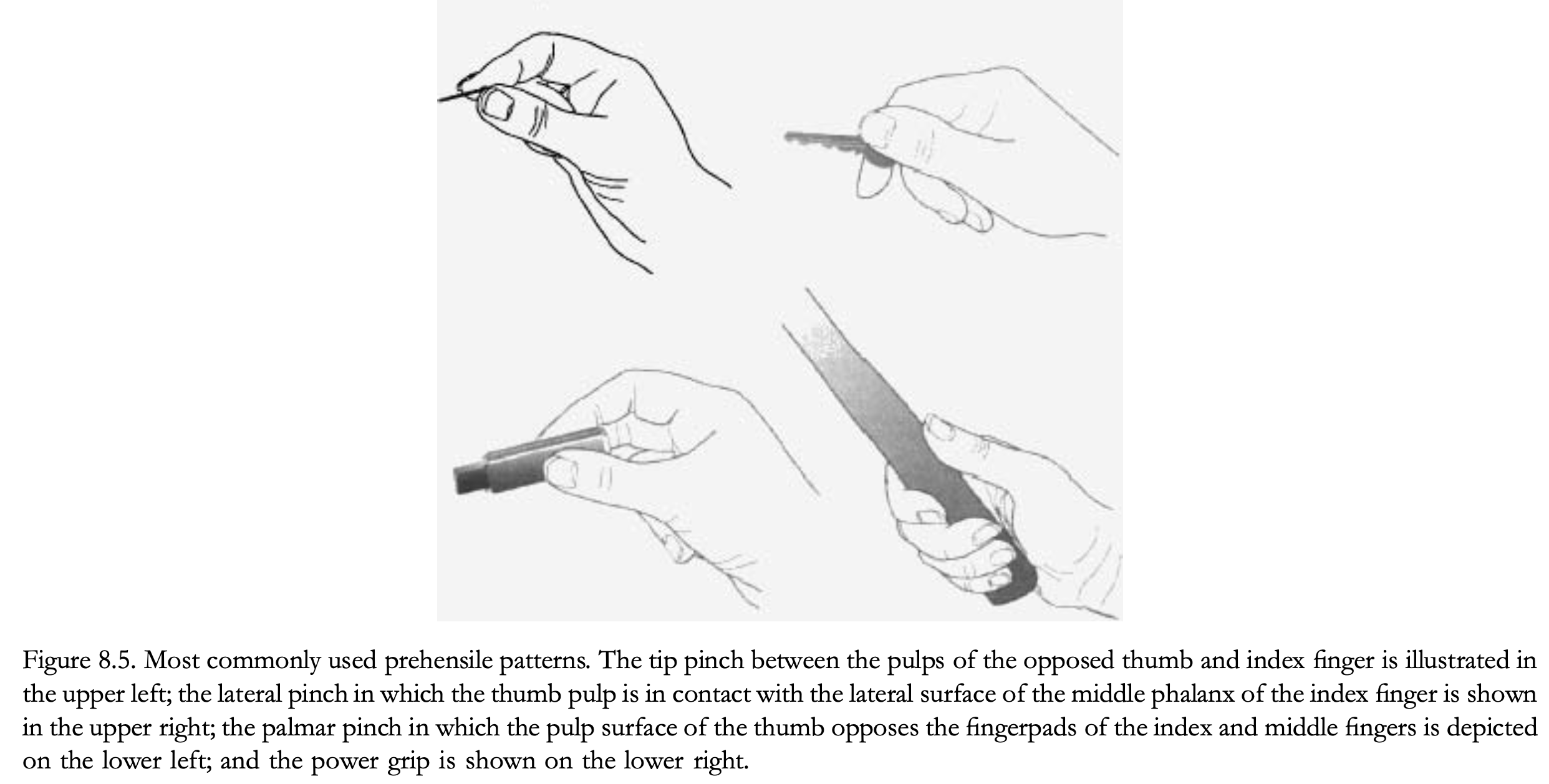
- Types of Precision Grips:
- Tip Pinch: Used to grasp small objects between the thumb and index finger's tips. For example, holding a needle for sewing uses a tip pinch.
- Palmar Pinch: The thumb opposes the pads of the index and middle fingers. For example, holding a small tool like a screwdriver with a palmar pinch.
- Lateral Pinch: The thumb contacts the side of the index finger’s middle phalanx. For instance, holding a key with a lateral pinch while turning it in a lock.
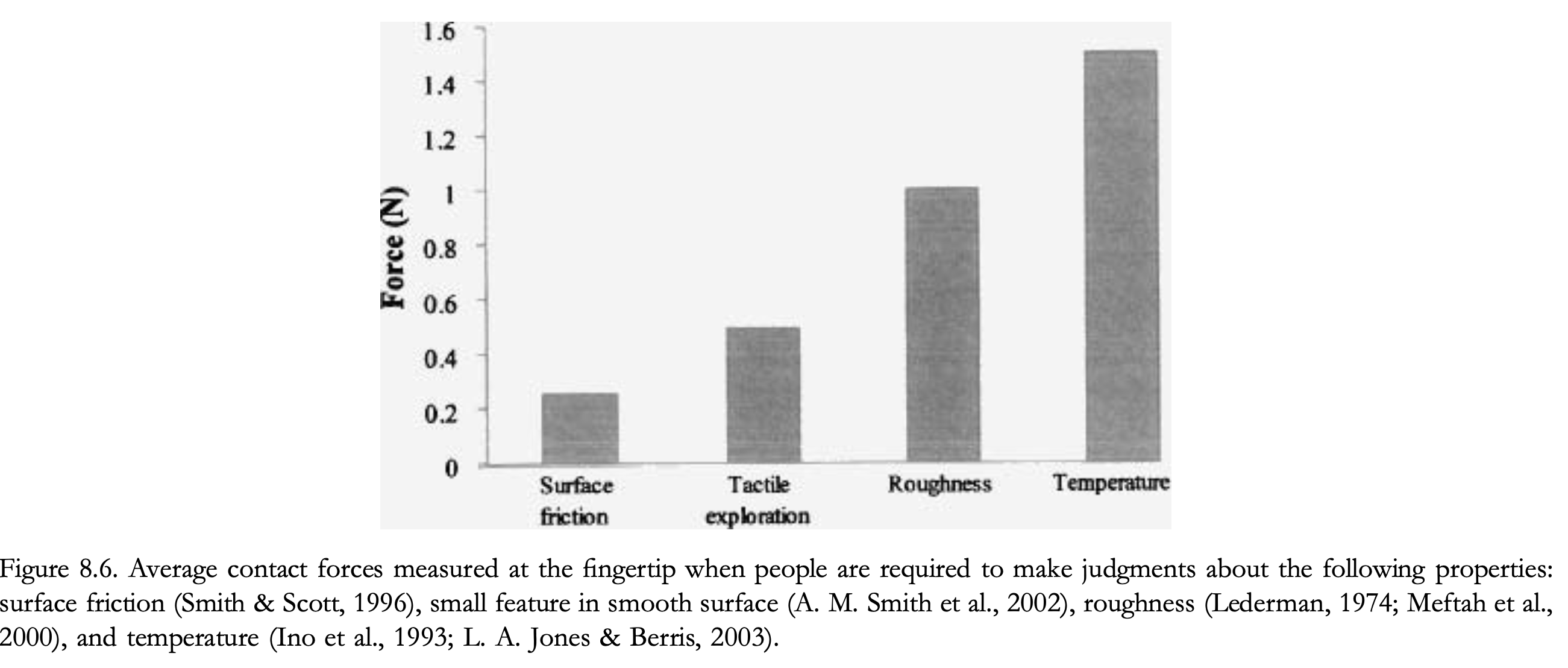
- Contact Forces:
- Force for Grasp Stability: Small contact forces, such as 1-2 N, are sufficient for maintaining grip stability. For example, holding a pencil to write requires a force of around 1 N to keep it steady.
- Force for Tactile Exploration: Different tasks require varying contact forces, such as 1 N for estimating surface roughness or up to 1.5 N for perceiving temperature. For instance, lightly pressing a finger to feel the texture of a fabric requires less force compared to pressing it to detect temperature.
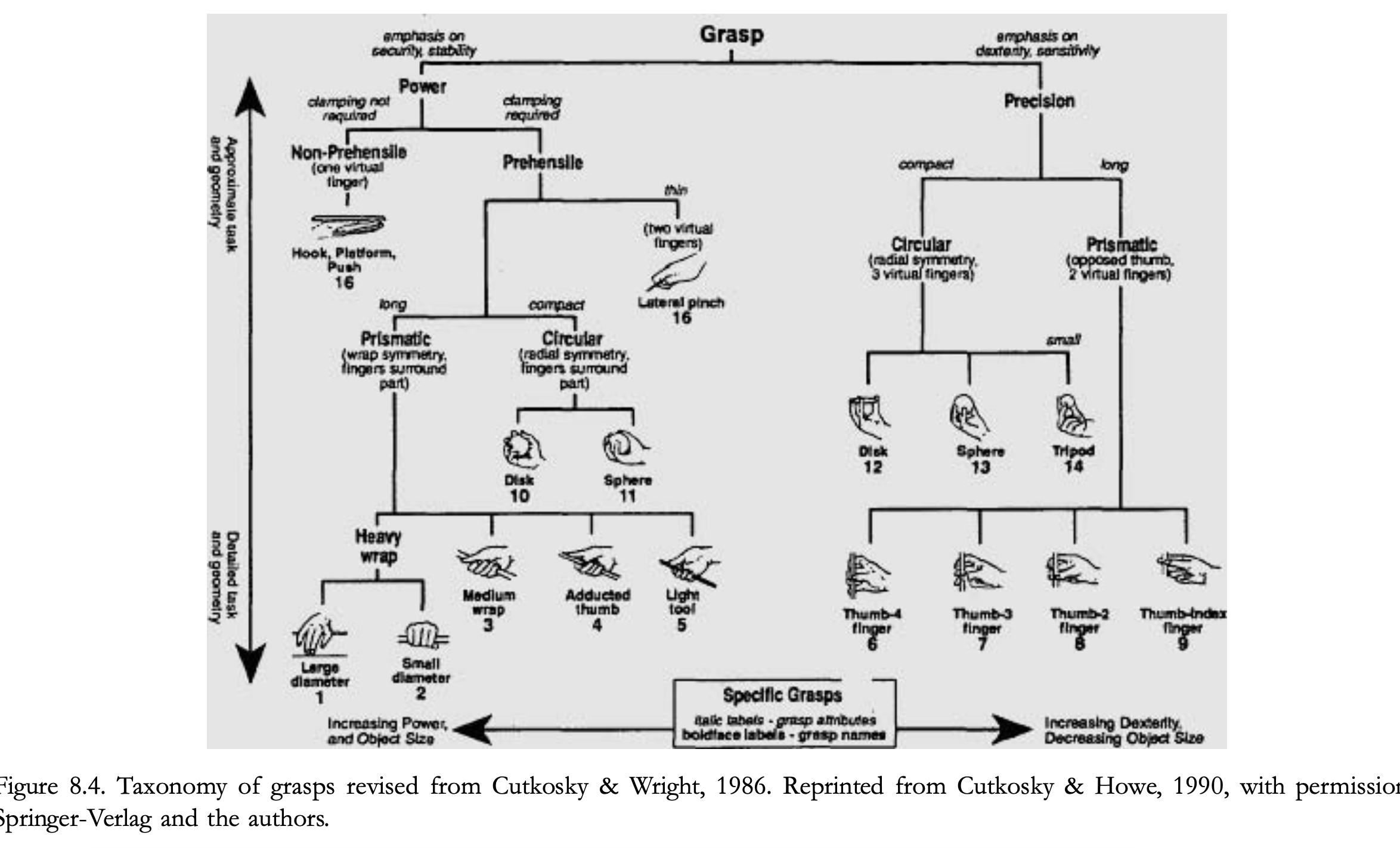
- Hand Postures and Object Shape:
- Non-Prehensile Grips: Some grips support rather than grasp objects. For example, a hook grip used to carry a suitcase, or a platform grasp used by a waiter to hold a tray, where the hand primarily supports the object without significant grasping.
- Challenges in Predicting Grasp Types:
- Task-Specific Grasps: Predicting specific hand grasps based solely on task and object geometry is difficult. For example, while using a wrench may generally involve a power grip, the exact posture may vary based on the specific action and object.
- Virtual Fingers Concept:
- Reduction of Degrees of Freedom: The concept of virtual fingers suggests that multiple fingers can function as a single unit during grasping. For example, the three-fingered tripod grasp can be seen as a single virtual finger, where the forces from the index and middle fingers act together as if from one finger.
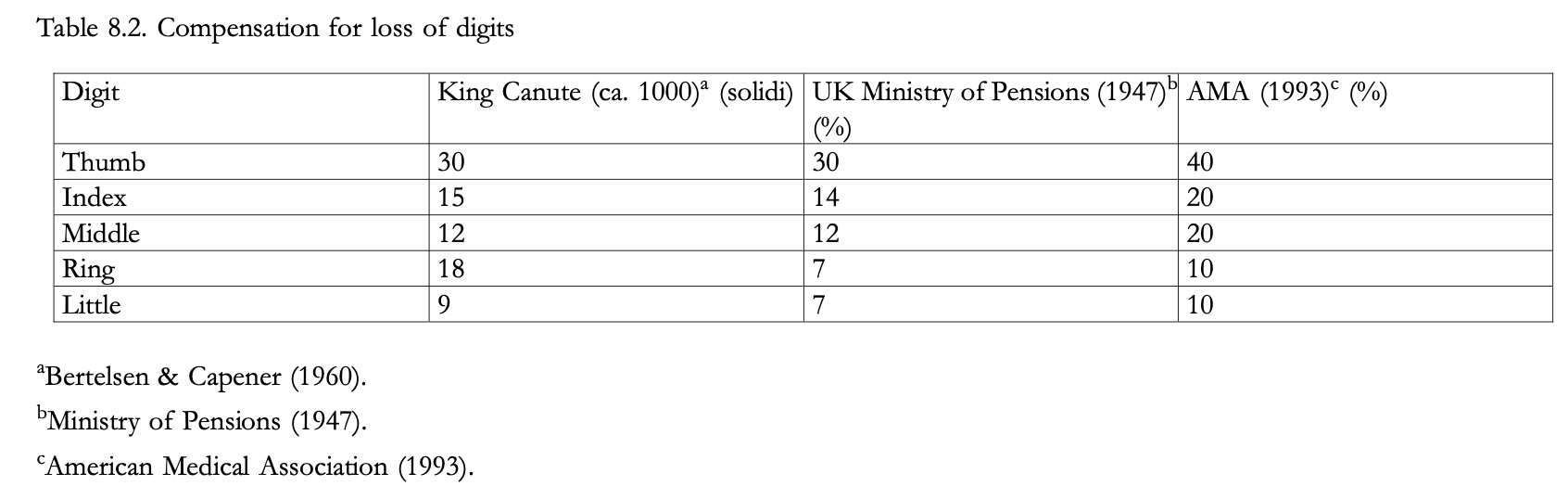
Number of Digits
- Thumb's Role: The opposable thumb is vital for handling and exploring small objects. Losing the thumb can lead to a significant functional loss of about 40%. For example, using a thumb to pick up small items like a needle is crucial for precision.
- Loss of Other Fingers:
- Index or Middle Finger: Loss results in about a 20% reduction in hand function. Tasks like typing or gripping are notably affected.
- Ring or Little Finger: Loss results in about a 10% reduction in hand function. These fingers are less crucial but still contribute to overall dexterity.
- Grasping Adaptation:
- Three-Fingered Grasp: Used for medium-sized objects. Example: Holding a cup with the thumb, index, and middle fingers.
- Four-Fingered Grasp: Used for larger objects. Example: Lifting a book or basketball with the thumb, index, middle, and ring fingers.
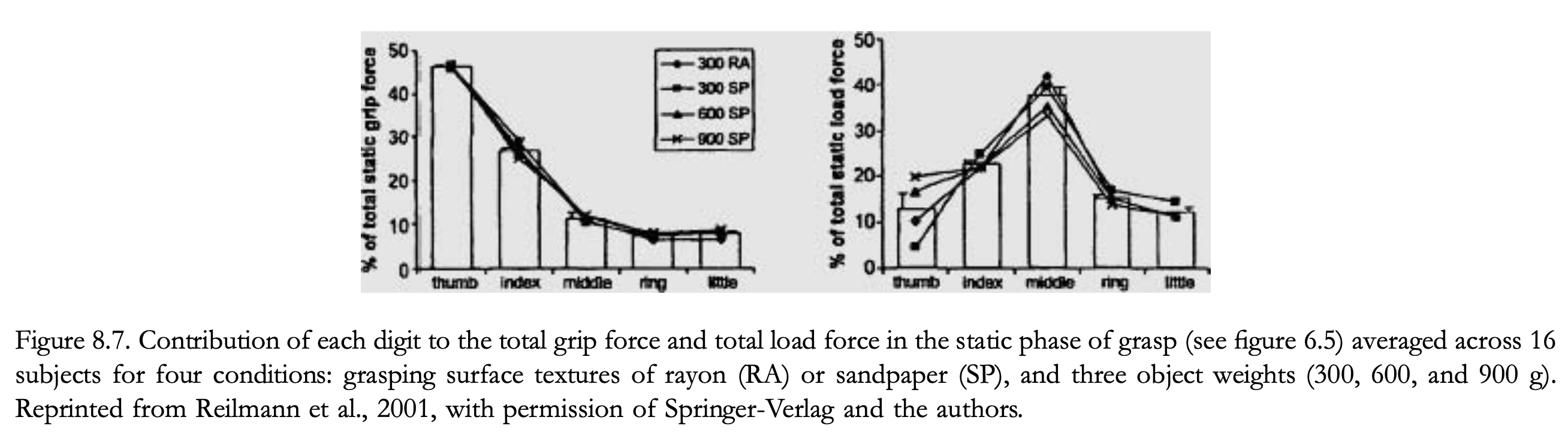
- Force Distribution:
- Index Finger: Provides a significant portion of grip force, especially as object weight increases. Example: Lifting heavy boxes involves substantial index finger force.
- Surface Texture: Grip force can be less for rough surfaces compared to smooth ones. For example, gripping sandpaper requires less grip force than gripping plastic due to increased friction.
Bimanual Grasping
- Coordination: Often, one hand stabilizes while the other manipulates. Example: Holding a piece of wood steady with one hand while using a saw with the other.
- Anticipatory Actions: In tasks such as catching a ball, the non-dominant hand adjusts in anticipation of the ball’s impact, illustrating coordinated movements and precise timing.
- Juggling: Requires high spatial and temporal coordination between hands. Expert jugglers rely on sensory feedback, adjusting throw angles and velocities to maintain consistency.
Remote Versus Direct Action:
- Tool Use: Tools are extensions of the hand, integrating into the body schema. Example: Using a hammer or driving a backhoe involves adapting to the tool as if it were part of the body.
- Sensory Integration: The brain integrates tools into its perceptual map, allowing for precise control. Studies show that the use of tools alters the brain’s sensory responses to include the tool’s properties, enhancing task performance.
"Non-prehensile Skilled Movements"
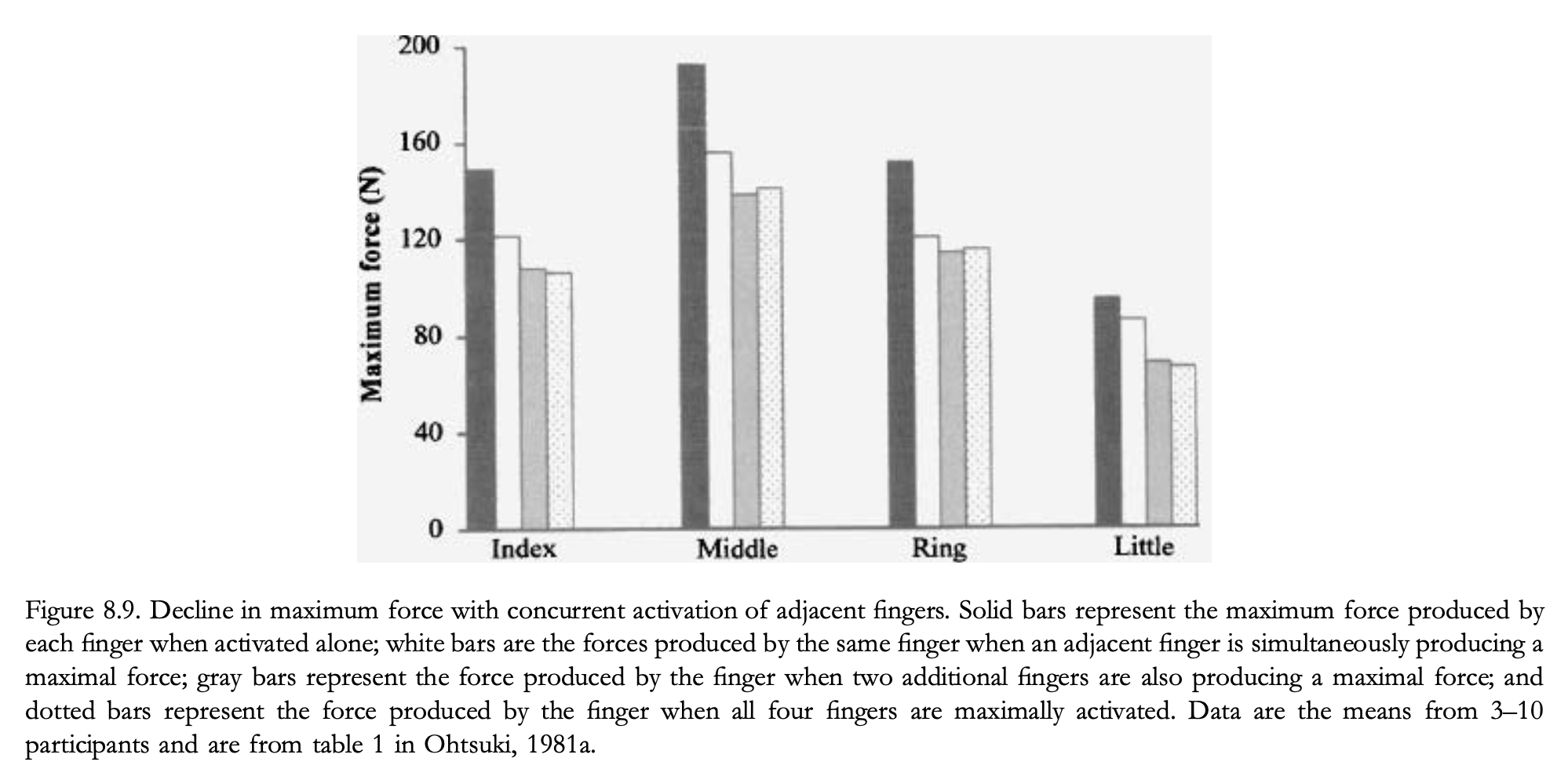
How Independent Are the Fingers?
- Finger movements are not entirely independent due to neural and mechanical constraints, resulting in coactivation of adjacent fingers.
- The thumb and index finger are the most independent, while the ring and middle fingers are the least.
- Maximum finger force is reduced when multiple fingers are used simultaneously, due to limited central neural drive.
- Sensory feedback from one finger can affect the motor commands of adjacent fingers, and changes in sensory inputs can significantly impact force production.
Coupling of Movements During Typing and Piano Playing
- Typing involves stereotypical, consistent finger and wrist movements with little variability, though the timing can vary depending on the word.
- In piano playing, movements are also consistent but involve anticipatory adjustments one note in advance.
- Typing tends to have synchronized finger movements, whereas piano playing often requires independent hand movements, reflecting task-specific constraints.
Bimanual Movements
- Research on bimanual movements shows that hands often synchronize their initiation and duration, but can move independently in skilled tasks like typing or piano playing.
- In typing and piano playing, hands often operate independently, with movements not affecting one another despite simultaneous activity.
- Skilled performers can adjust timing independently for each hand, showing task-dependent coordination constraints.
Hand Preference
- Hand preference refers to the habitual use of one hand over the other, with right-handedness being more common.
- Handedness is a continuum rather than a binary trait, with some variability in handedness and hand strength among individuals.
- Performance differences between hands are minimal in well-practiced tasks like typing, but right-handed individuals may show better coordination and efficiency with their dominant hand.
- Professional musicians may have reduced hand preference asymmetry due to extensive practice, which improves the performance of the non-dominant hand.
'Research (연구 관련)' 카테고리의 다른 글
| Model Parallelisum (0) | 2024.08.23 |
|---|---|
| HHF Part9 - Hand Function Across the Lifespan (0) | 2024.08.23 |
| HHF Part7 - Non-prehensive Skilled Movements (0) | 2024.08.20 |
| HHF Part6 - Prehension (0) | 2024.08.19 |
| HHF Part5 - Active Haptic Sensing (0) | 2024.08.19 |
공지사항
최근에 올라온 글
최근에 달린 댓글
- Total
- Today
- Yesterday
링크
TAG
- 비전
- densepose
- world coordinate
- pytorch
- pyrender
- Pose2Mesh
- Transformation
- Generative model
- Virtual Camera
- deep learning
- part segmentation
- nohup
- 피트니스
- 머신러닝
- 컴퓨터비젼
- 헬스
- demo
- 인터뷰
- camera coordinate
- spin
- Docker
- 문경식
- Interview
- Machine Learning
- 2d pose
- 에디톨로지
- nerf
- VAE
- 컴퓨터비전
- focal length
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | ||||
| 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| 11 | 12 | 13 | 14 | 15 | 16 | 17 |
| 18 | 19 | 20 | 21 | 22 | 23 | 24 |
| 25 | 26 | 27 | 28 | 29 | 30 | 31 |
글 보관함