
티스토리 뷰
What is prehension?
"A grasp is every static hand posture with which an object can be held securely with one hand, irrespective of the hand orientation". - Feix et al. (2016, p. 67)
"Grip is when you move your arm all around and the object still deosnt' fall out" - Kamakura et a. (2022, p. 30)
So "hook" is not a form of grip according to them. depends on what hopok is though...
What is "Taxonomy of Prehension"? - Noriko group observed 700+ grips from ~100 objects and 7 healthy subjects.
1. Power Grips: Grips in which the contact region ran from the palm into the palmar surfaces of the fingers

2. Intermediate Grips: Grips that involved the radial surface of at least one of the fingers

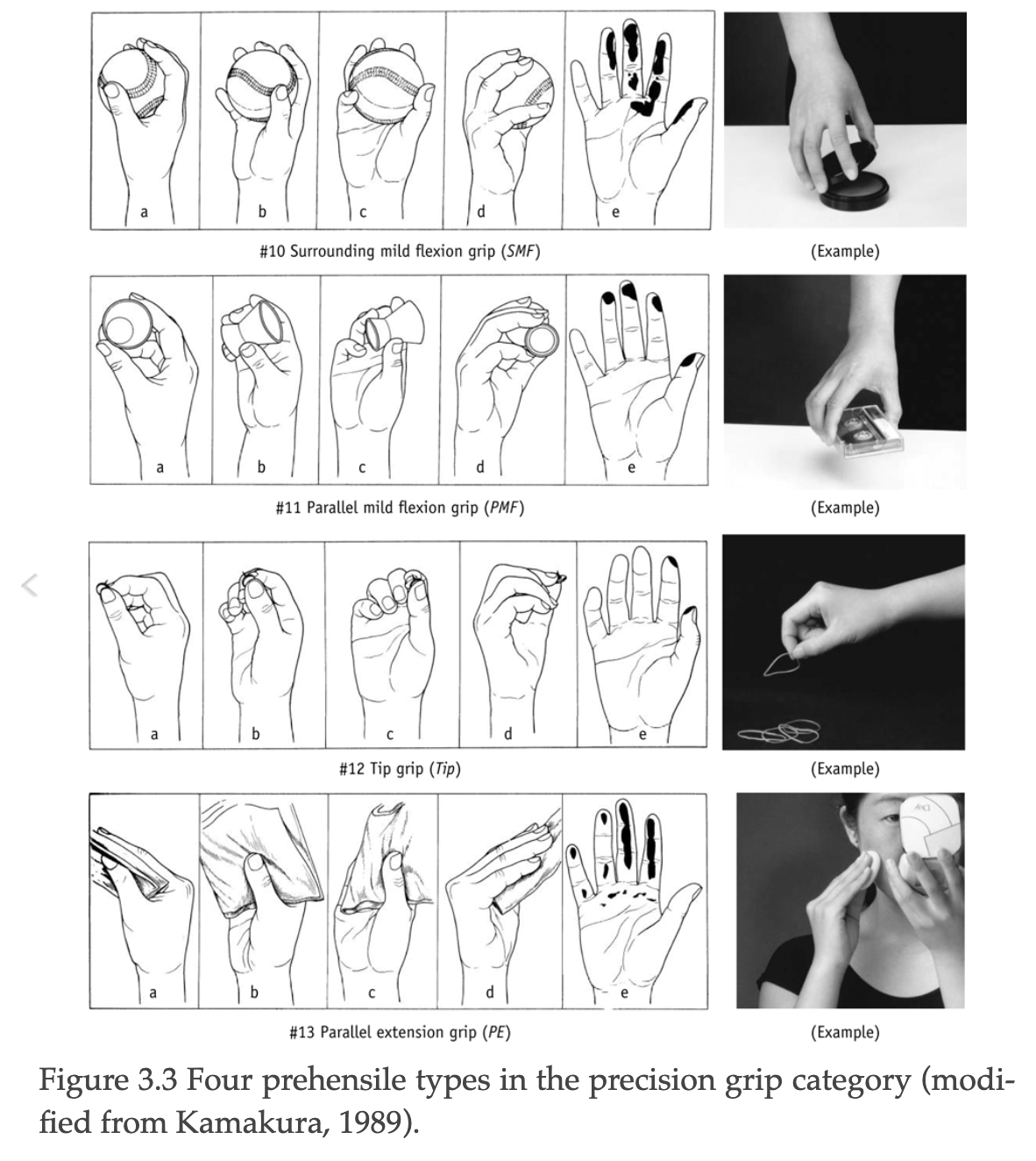
3. Precison Grips: Grips in which the contact was mainly on the palmar surfaces of the thumb and at least some of the fingers
4. Thumbless Grip: Only one type; Grip in which thumb plays no part and a light object is secured between adjacent fingers

How do we choose our grips?
- Object's size and shape
- How it is placed beforehand
- How big and strong your hand is
- Your habits
- What kind of mood you're in
Relative geometry (size, shapet) of object and hand
Contact features: object surface roughness and texture, hand surface
Relative physical features (temperature, mass, muscle strength)
Subject's habits, tendency (ex. willing to grab sharp things...?), kind of mood
'Research (연구 관련)' 카테고리의 다른 글
| Retargeting human hands to robot hands (0) | 2024.09.30 |
|---|---|
| Human Hand Function: Conclusion (0) | 2024.09.14 |
| VNC,vglrun, simulation, forwarding (0) | 2024.09.07 |
| HuMoR (0) | 2024.09.06 |
| Quarternions / Gimbal lock (0) | 2024.09.01 |
- Total
- Today
- Yesterday
- Virtual Camera
- spin
- Transformation
- part segmentation
- camera coordinate
- 인터뷰
- nohup
- Interview
- densepose
- 에디톨로지
- 피트니스
- nerf
- 2d pose
- 컴퓨터비젼
- Machine Learning
- pytorch
- world coordinate
- Pose2Mesh
- 컴퓨터비전
- demo
- focal length
- Generative model
- 문경식
- 머신러닝
- 비전
- Docker
- deep learning
- 헬스
- VAE
- pyrender
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |