
티스토리 뷰
Camera Distance-aware Top-down Approach for 3D Multi-person Pose Estimation from a Single RGB Image
홍돌 2020. 7. 1. 16:512019 ICCV 논문으로 연구실 선배인 경식이형의 논문이다. 이 포스트의 목적은 이 논문의 모듈 중 하나인 'RootNet'에 대해서, 그 중에서도 논문 자체의 contribution보다는, focal length, camera-object distance (depth), per-pixel distance factor에 대해 다룬 내용을 이해하는 것이다.
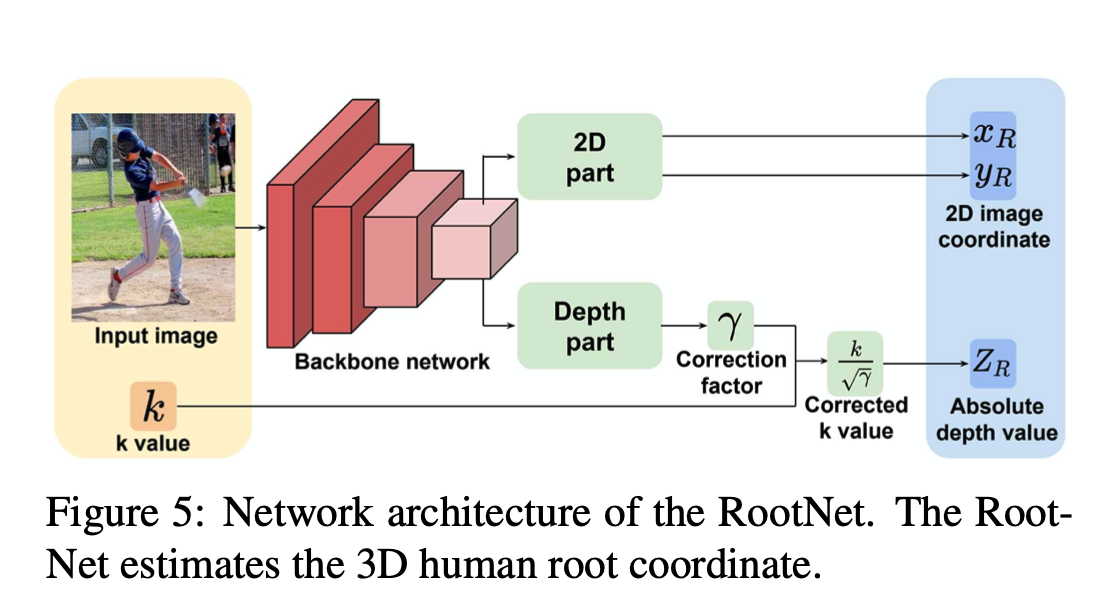
RootNet의 output은 human root joint의 coordinate인 (x,y,Z)이다. x,y는 img coordinate이고, Z는 camera-centered coordinate system 상의 coordiante으로 root joint의 depth다. inference time 때 x,y는 Z를 구한 후에 Z값과 미리 가정한 focal length에 의해 camera-centered coordinate system 상의 coordinate인 (X,Y)로 back project된다. 이 얘기는 마지막에 다시 하겠다.
root joint의 absolute depth인 Z는 k라는 initial absoulute depth approximation 값 (learning과 상관없음)과 deep learning network의 output으로 depth에 대한 correction factor인 r (gamma)를 곱해 만들어진다. supervision은 root joint의 camera coordinate인 (X,Y,Z)에 행해진다. 이 포스터의 주요 관심사는 이 k로 정의는 다음과 같다.

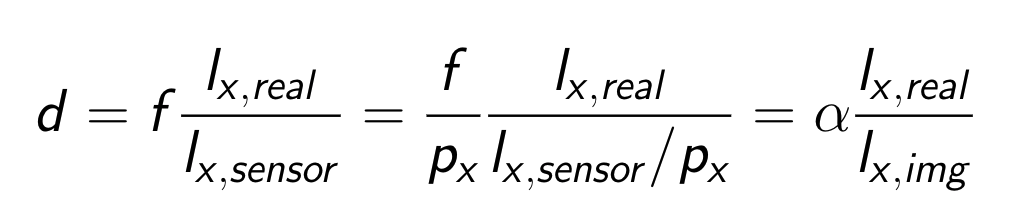
where alpha x, alpha y, Areal, and Aimg are focal lengths divided by the per-pixel distance factors (pixel) of x- and y-axes, the area of the human in real space (mm2), and image space (pixel2), respectively. k approximates the absolute depth from the camera to the object using the ratio of the actual area and the imaged area of it, given camera parameters. Eq 1 can be easily derived by considering a pinhole camera projection model. The distance d (mm) between the camera and object can be calculated as follows:

즉 d라는 root joint의 approximated depth를 제곱하고 제곱근을 구한 게 k이다. 그렇다면 (2)의 equation이 어떻게 나오는 지 이해해야 하는데, 그전에 pin-hole camera model에서 다음과 같은 식이 성립한다는 것은 다들 이해할 것이다.
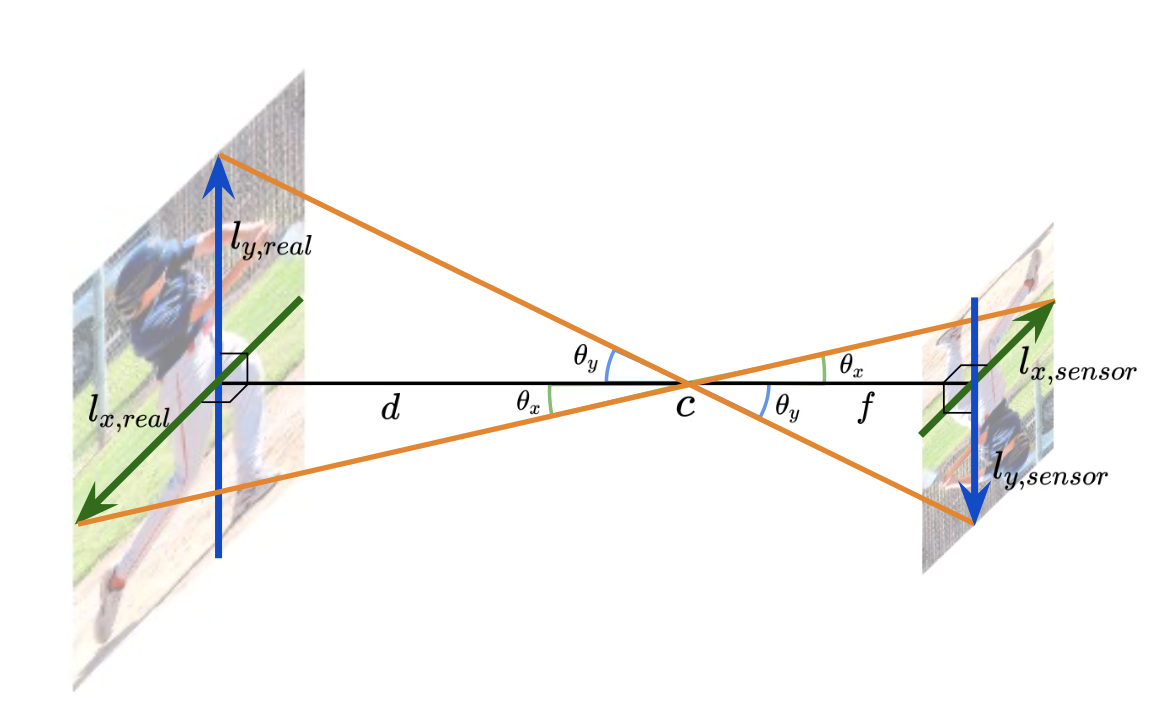

이제 바로 위의 식이 어떻게 (2)으로 바뀌는 지 알려면, alpha x,y 즉 focal length divided by per-pixel distance factor라는 조금 생소한 개념을 이해해야 한다. 여기서 per-pixel distance factor라는 카메라 기종마다 고유한 고정값으로(아마도..), pin-hole camera model을 가정할 때 camera의 image sensor 상에서의 피사체의 단위(mm)를 pixel값으로 바꿔주는 factor의 역수이다. 이 per-pxeil distance factor를 px라 하고 (2)의 equation을 다시 써보면 다음과 같다.
다시 (1)의 equation으로 돌아오면, 본 논문에서는 k를 x-axis에서 근사한 d와 y-axis에서 근사한 d를 곱한 후 제곱근으로 계산했다. 그냥 한 axis에서 구한 d를 쓰거나 두개를 더한 후 나눈 값을 쓰지 않고, 이렇게 한 이유는 아마 (1) equation의 Areal, Aimg 값들이 여러 input에 대해 robust하게 나올 수 있기 때문일 것이다.
위에까지가 이 포스트의 주요 관심사이고, 그렇다면 training때와 inference 때 k의 각 구성 요소인 alpha x, alpha y, Areal, and Aimg는 어떻게 구할까. alpha x,y는 training 때 데이터셋의 카메라 intrisic parameter로부터 구할 수 있고, inference 때는 임의로 설정할 수 있다. 즉 inference 때는 미리 정한 (camera normalized) focal length에 대한 initial depth approximation k를 임의로 설정한다. Aimg는 training, inference 상관없이 input의 bounding box로부터 얻을 수 있고, Areal은 2000mm*2000mm로 고정한다. Areal 값을 고정하는 로직은, 피사체를 항상 사람으로 가정하기 때문에 평균적인 사람의 크기를 가져다 쓴다는 개념이다. 당연히 이렇게 고정된(constant) Areal값으로부터 나온 k는 에러가 있을 수 밖에 없는데, 바로 Areal이 고정된 값이라는 것에 대한 에러를 correction하는 값(r=gamma)을 learning하는게 바로 RootNet의 목적이다. Areal에 대한 correction factor를 learning할 수 있는 이유는 image feature로부터 그런 정보를 얻을 수 있다는 가정 때문이다. 예를 들어 두 피사체(사람)가 카메라로부터 같은 거리에 있더라도 pose가 다르면 Areal이 다른 데, 사람과 마찬가지로 deep learning network도 image feature를 통해 두 사람의 pose가 다르다는 것을 알 수 있다. 다른 예로 어른과 아이는 Areal이 다른 데, 이 때문에 어른이 카메라로부터 아이보다 더 멀리 있어도 면 Aimg가 더 작거나 비슷해져, 결국 아이보다 더 작거나 비슷한 depth(k)값을 가지게 되는데, deep learning network가 어른/아이 여부를 판별할 수도 있다.

'Research (연구 관련)' 카테고리의 다른 글
| ubuntu에 swap memory 만드는 법 (0) | 2020.10.03 |
|---|---|
| Pyrender사용법 (8) | 2020.09.17 |
| detectron2 install (0) | 2020.06.23 |
| spin demo 코드 이해 및 이용 (0) | 2020.06.10 |
| random walk & markov chain (0) | 2020.05.22 |
- Total
- Today
- Yesterday
- densepose
- VAE
- Generative model
- pytorch
- 컴퓨터비전
- 인터뷰
- world coordinate
- part segmentation
- Machine Learning
- 문경식
- pyrender
- Interview
- 피트니스
- deep learning
- 컴퓨터비젼
- 헬스
- nohup
- focal length
- 머신러닝
- spin
- demo
- Pose2Mesh
- Virtual Camera
- 2d pose
- 에디톨로지
- Transformation
- Docker
- 비전
- nerf
- camera coordinate
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |