
 최적화와 머신러닝 (Optimization and ML)
최적화와 머신러닝 (Optimization and ML)
머신러닝은 objective function ( loss function )의 값을 minimize한다는 면에서 최적화의 일종으로 볼 수 있다. 하지만 이전의 최적화문제와 차이점이 이론적으로도, 실질적으로도 분명히 있고, 그렇기 때문에 machine learning이라는 분야를 별도로 취급한다. 첫째. 이론적으로 최적화 문제는 수학(mathematics)의 영역이고 머신러닝은 엔지니어링(engineering)의 영역이다. 최적화 문제의 Solution은 수학적으로 도출/설명이 가능하지만, 머신러닝의 Solution은 수학적으로 설명 불가능하며 ambiguous한 면이 있다. 머신러닝의 Solution은 아이디얼한 정답을 근사할 뿐이다. 출처: Quora 둘째. 실질적으로 최적화 문제는 가지고 있는 데이터..
 Virtual Camera / Left handed rule
Virtual Camera / Left handed rule
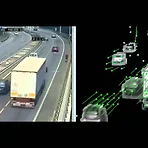
2021.08.06 Update. 이 포스트 말고 아래 링크 보면 됩니다. https://redstarhong.tistory.com/174 novel view synthesis, virtual camera 사람을 중심으로 camera 위치를 변형해 novel view synthesis를 하는 일을 하고 있다. 이 때 camera 위치 변화에 따라 camera parameter를 어떻게 바꿀지가 중요한데, 이 포스트는 코드와 함께 개념을 되짚어본 redstarhong.tistory.com 2021.04.06 Update 이 포스트는 내가 잘못 이해한 것들이 너무 많아 다른 사람은 안 읽는 게 나을 것 같고, 이걸 보는 걸 추천한다. Human3.6m데이터를 Virtual Camera를 통해 Augment하..
 VAE ( Variational AutoEncoder )
VAE ( Variational AutoEncoder )
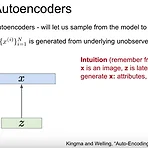
이전 포스트에서 왜 Generative Models의 정의가 P(X,Y)를 구하는 게 아니라 왜 P(X)를 구한 후 샘플링하는 것이 목적이라고 하는 지 이해가 안 간다고 하였다. 여러 VAE를 설명하는 해외/국내 블로그들이 시작할 때 P(X)가 목표다 라고 하는데, 실제로는 Given Y에 대해 가장 그럴듯한 데이터 X를 생성하는 것이 목표이므로 P(X,Y)가 목표라고 생각한다. 곰곰이 생각해본 결과, 결과적으로 Generative Models 중 하나인 VAE가 결국 P(Y|X), P(X,Y), P(X|Y)를 모두 학습하기 때문에 P(X) / 데이터의 진정한 분포를 학습한다고도 할 수 있는 것 같다. GAN이 Implicit하게 P(X)를 구한다는 표현은 P(Y|X), P(X,Y), P(X|Y)를 따로..
 Generative Models
Generative Models
머신러닝 모델 혹은 그 이전에 확률 모델 알고리즘에는 크게 Discriminative Model과 Generative Model이 있다. (머신러닝, 확률 분야의 경계가 명확한 지는 모르겠다) Discriminative Model은 statistical classfication(통계적 분류) 중 하나로 input data X가 있을 때 Y를 바로inference(추론)해내는 알고리즘이다. 바꿔말하면 P(Y|X)를 바로 구한다. 대부분의 Supervised machine learning이 Discriminative Model에 속한다. Discriminative models, also referred to as conditional models, are a class of models used in sta..
 초고속 광대역 통신 (Bandwidth & Latency)
초고속 광대역 통신 (Bandwidth & Latency)
5G 기술을 공부하다 보니 헷갈리는 것이 있어 정리한다. 5G를 통해 실현되는 기술적인 일들로 흔히 빠른 데이터 전송, 적은 지연시간을 꼽는다. 그런데 빠른 데이터 전송과 적은 지연시간은 무슨 차이가 있는 지 궁금했다. https://www.highspeedinternet.com/resources/bandwidth-vs-latency-what-is-the-difference 흔히 유무선 인터넷 속도를 얘기할 때 우리가 논하는 것은 다운로드 속도(Download Speed)이다. 영화 1편을 1초에 ~ 이런 것들. 보통 이것을 가능하게는 것을 넓은 주파수 대역 - 광대역 - Broad Bandwidth라고 하고, Pipeline에 비유하자면 관의 넓이이다. 하지만 다운로드 속도(Download Speed)..
 Optical Flow
Optical Flow
This post explains my understanding on Aperture Problem in Optical Flow and Lukas-Kanade method which is one of approaches to solve the problem. First, Optical Flow is a one way to estimate motion flow by analyzing pixel images of continous frames. Assuming Bright Constancy which leads to Gradient Constancy, one can define a line in the (u, v) space where u, v stand for dx / dt , dy / dt. But we..
 Install cmake
Install cmake
cmake는 os에 상관없이 make를 수행할 수 있는 meta make이다. UNIX 중심 make에 대한 대안이라나. make자체는 프로그램 빌딩 도구로 위키에 다음과 같이 정의되어 있다. make는 소프트웨어 개발을 위해 유닉스 계열 운영 체제에서 주로 사용되는 프로그램 빌드 도구이다. 여러 파일들끼리의 의존성과 각 파일에 필요한 명령을 정의함으로써 프로그램을 컴파일할 수 있으며 최종 프로그램을 만들 수 있는 과정을 서술할 수 있는 표준적인 문법을 가지고 있다.위의 구조로 기술된 파일(주로 Makefile이라는 파일명)을 make가 해석하여 프로그램 빌드를 수행하게 된다. https://cmake.org/download/ 여기서 자기 OS(난 MACOS)에 맞는 install package를 다운로..
 sudo w
sudo w
credit to https://catonmat.net/sudo-vim How to save read-only files in vim How many times have you had a situation when you open a file for editing, make a bunch of changes, and discover that you don't have the rights to write the file? This has happened to me a lot. It usually goes like this. You open a file and you forget to us catonmat.net This is a merely Korean translation for the post abov..
 Binocular Disparity
Binocular Disparity
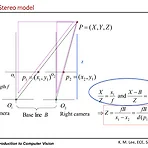
Wikipedia의 영어설명은 사람 눈의 관점에 쓰여있고 Visualization도 눈으로 되어 있따. Disparity의 단위가 Angle이라 되어있어서 읭 싶었다. 한글 설명을 찾으려다 그냥 수업 교재에 잘 설명되어 있었다. d(p1) = x1 - x2 이 바로 Binocular Disparity이고, 두 Stereo Images에서 대응되는 두 점 사이의 distance이다. 말 그래도 거리라기보단 차이! 각각의 이미지에서 두 점이 갖는 픽셀위치를 계산해서 빼주면 된다.
 Ad hoc categories
Ad hoc categories
Ad hoc: "이것을 위해" 즉 "특별한 목적을 위해서" == "for this purpose" Object Categorization (Bags of Words Model) 수업 중 Ad hoc Category가 잠깐 언급됐다. 일반적인 카테고리들(Common Categories)로는 과일, 바지 등이 있고 그 외의 카테고리들로는 functional categories, ad hoc categories가 있으며 각각 chairs = “something you can sit on”, “something you can find in an office environment”가 예시로 들어졌는데 둘이 무슨 차이인지, 특히 Ad-hoc category 자체의 정의가 무엇인지 헷갈렸다. 그래서 구글링을 엄청했는..
- Total
- Today
- Yesterday
- 컴퓨터비젼
- 피트니스
- 2d pose
- camera coordinate
- Machine Learning
- 인터뷰
- Generative model
- demo
- 컴퓨터비전
- deep learning
- 머신러닝
- 문경식
- Docker
- VAE
- Interview
- nohup
- 헬스
- focal length
- pyrender
- Pose2Mesh
- 에디톨로지
- pytorch
- Virtual Camera
- nerf
- spin
- world coordinate
- 비전
- Transformation
- densepose
- part segmentation
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | |||||
| 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| 10 | 11 | 12 | 13 | 14 | 15 | 16 |
| 17 | 18 | 19 | 20 | 21 | 22 | 23 |
| 24 | 25 | 26 | 27 | 28 | 29 | 30 |